As mãos presas de robot ou EOAT (End Of Arm Tooling) podem satisfazer as mais variadas especificações da indústria dos plásticos, tais como: salvaguadar a integridade das peças, reduzir os tempos de ciclo, economizar custos com pessoal e melhorar as condições ergonómicas, aumentando desta forma, a produtividade.
Projetadas com componentes standard, de encaixe rápido, ou componentes especiais, concebidos especificamente para cada aplicação, as nossas mãos presas operam em qualquer tipo de robot e adaptam-se a qualquer processo de manipulação de peças, desde a sua extração, até à movimentação de um ponto ao outro.
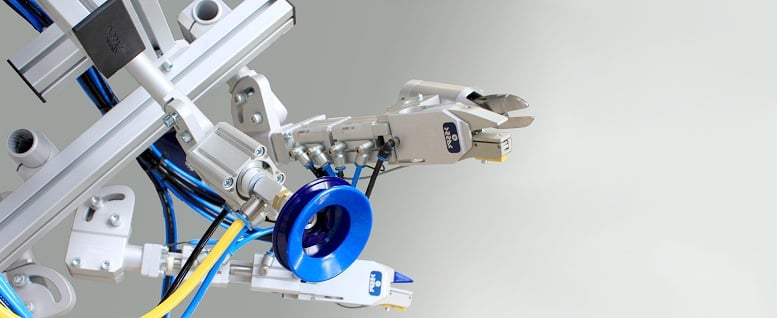
Mãos Presas de Robot Customizadas
As peças em plástico injetado, especialmente aquelas com geometrias mais complexas, exigem mãos presas concebidas à medida para que possam ter um bom desempenho na remoção dos moldes e posterior manipulação e transporte.
As mãos presas de robot são, por isso, uma parte essencial dos sistemas, pois da sua integração podem depender ganhos de produtividade e comprometimento da qualidade das peças.
Para que todas as peças, mesmo as mais complexas, cumpram os padrões de qualidade estabelecidos, asseguramos o projeto, design, construção, automação e ajuste de mãos presas e sistemas de garras completas, ficando estas prontas a utilizar nos mais diversos sistemas de produção e manipulação.
O nosso processo de conceção de mãos presas customizadas foi consideravelmente simplificado e é adaptável a cada caso. Independentemente da complexidade dos desafios que terão de ser ultrapassados, desenvolvemos um projeto pormenorizado tendo por base as características da peça e do molde, assim como as especificações do cliente. Após a execução, são efetuados testes em fábrica, ajustes e acompanhamento do arranque no local de instalação e, por fim, o comissionamento da mão presa e suporte pós-venda, quando necessário.
Todas as nossas mãos presas cumprem a diretiva máquinas, uma vez que são consideradas quase máquinas, fazendo-se acompanhar por uma declaração de incorporação de quase máquinas e um manual de incorporação, que visa auxiliar o integrador no acoplamento da mão ao braço robótico.

Componentes EOAT para Mãos Presas de Robot
Para quem opta por construir as suas próprias mãos presas de robot, em detrimento dos projetos "chave na mão", disponibilizamos uma gama com mais de 1900 componentes, que permitem construir garras de forma rápida, económica e simplificada.
Desta forma, mudanças de layout, mudanças ao nível da automação ou mesmo das peças que se pretende manipular, não representam um obstáculo e, em pouco tempo, é possível construir ou adaptar a mão presa no local.

Para saber mais acerca do nosso serviço de desenvolvimento e construção de mãos presas, contacte a nossa equipa técnica especializada.
